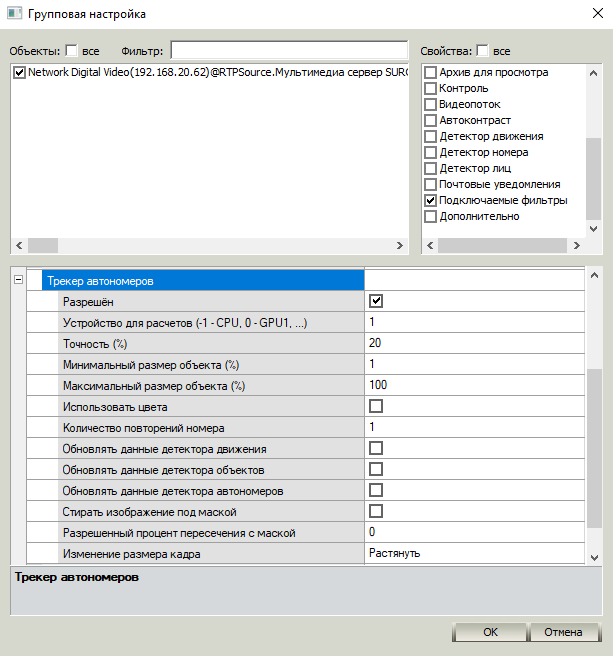
"Устройства для расчетов (1 - CPU, 0 - GPU1...)" - Позволяет выбрать мощьности какого устройства будут задействованы для работы нейросети. (Видеокарта или центральный процессор)
"Точность (%)" - Отвечает за точность сравнения детектируемых объектов с базой данных нейросети. Если полезные объекты не определяются, то понизить. Если определяются помехи как полезные объекты – повысить.
"Минимальный размер объекта (%)" - в данном параметре задается минимальный размер объекта в процентах, от общей площади кадра.
"Максимальный размер объекта (%)" - в данном параметре задается максимальный размер объекта в процентах, от общей площади кадра.
"Использовать цвета" - По умолчанию, нейронная сеть анализирует черно-белое изображение. Эта настройка позволяет нейросети использовать цветное изображение. Это улучшает детекцию, но и увеличивает нагрузку на компьютер. И надо понимать, что в темное время камеры работают в черно-белом режиме.
"Количество повторений номена" - сколько раз нейросеть должна увидеть номер прежде чем определить его.
"Обновлять данные детектора движений" - Заменяет работу детектора движений на работу нейросети. Все настройки, ориентированные на видеодетектор, например, запись видео на диск, будут работать по данным сработок нейросети. При активации необходимо выключить детектор движений, чтобы исключить конфликты модулей программы.
"Обновлять данные детектора объектов" - Заменяет работу детектора объектов на работу нейросети. При активации необходимо выключить детектор объектов, чтобы исключить конфликты модулей программы.
"Обновлять данные детектора автономеров" - Заменяет работу устаревшего детектора автономеров на работу нейросети.
"Стирать изображение под маской" - для того чтобы избежать ложных срабатываний, объекты под маской будут стираться с изображения.
"Разрешенный процент пересечения с маской" - если объект под маской выйдет за пределы маски, этот параметр определит нужно ли детектировать объект.